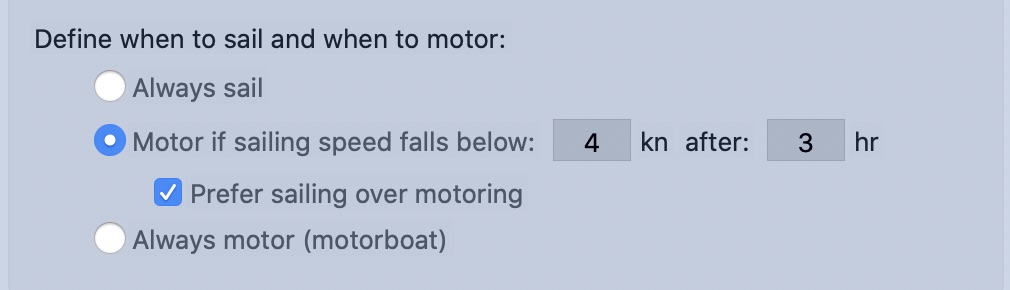
These settings control when the solver will have the vessel sail or motor. There are, of course, two simple settings: always sailing and always motoring. Those have the obvious effect.
The remainder of this discussion is related to the middle option, for a sailboat which is allowed to motor under some circumstances.
Sailing speed threshold.
The speed provided for the middle option is the threshold where the solver starts to make decisions about when to sail and when to motor. Note that the speed is the speed through the water, not the speed made good (which includes current in its calculation.)
The sequence of isochrones are built one by one, with each new isochrone built from the points on the previous one. The solver makes the sail or motor decision for each heading radiating out from every point on the previous isochrone.
Waiting time.
Depending on how patient you may be, it may be possible for a sailboat to slow down for a time and then have fresh wind arrive and resume sailing normally. You can specify the number of hours you are willing to wait for fresh wind to arrive.
Setting the waiting time to 0 hours means the engine will be turned on immediately if the boat slows below the threshold speed.
The waiting time should be considered the minimum amount of time that the boat will wait. The actual waiting time will be determined by the time interval between isochrones.
For example, if the waiting time is set to 3 hours, and the solver is using an isochrone time interval of 2 hours, as on a long ocean passage, then the actual waiting time will be 4 hours. The waiting time is approximate.
Note that, as the navigator studing these results, if you see the vessel has slowed down, waited some number of hours and then turnd on its engine. You may, of course, decide to engage the engine more quickly.
Prefer sailing over motoring.
There are no established rules governing how a weather router solver makes its decisions on when to start or stop motoring. In the real world, there can be many factors influencing this decision:
- how close are you to your destination? You may have different sail/motor rules if the destination is thousands of miles away, or only a few hours.
- how large are your fuel reserves?
- how willing are you to sail slowly rather than making faster progress?
- can you motor early to arrive at a destination in daylight hours?
This setting is a very general way to express your preference about whether or not you would prefer to sail, even if that takes longer, or if you simply want to make the fastest progress possible. Of course the ultimate way of expressing the preference to sail is to set the vessel to be a pure sailing boat.
If you are looking for an example where you will see a large difference due to this setting, try setting a wide minimum upwind sailing angle, set the solver to prefer to sail and then generate a route which is directly upwind. With this setting turned off, the solver will often motor directly into the wind in order to make progress. When you prefer to sail, the solver will tend to make wide tacks, back and forth, struggling to make progress.