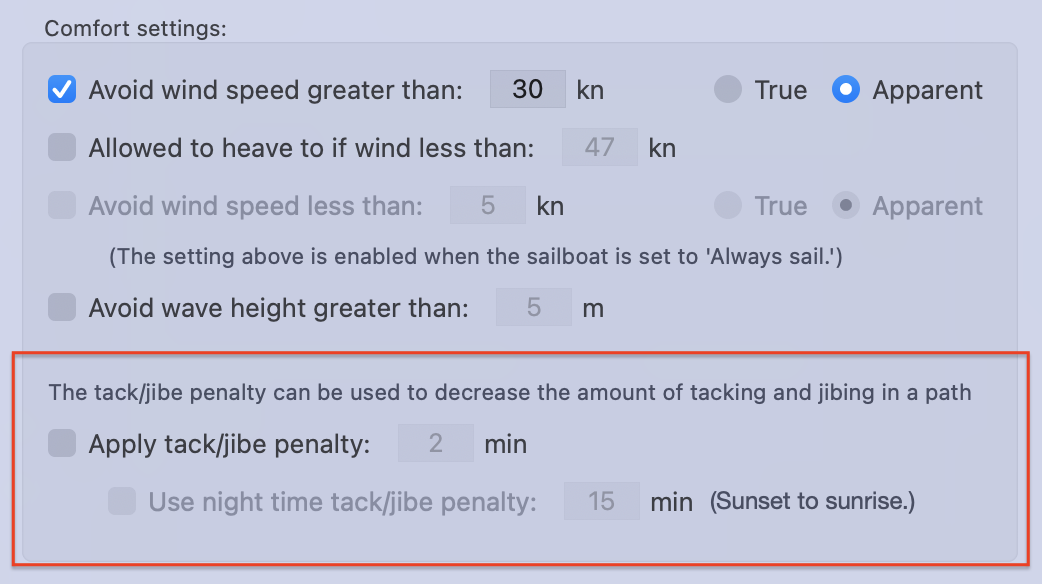
(These setting are enabled through the application preferences.)
Tack / jibe penalty.
Normally, the solver does not apply a penalty to vessels as they tack and jibe. In reality, vessels will slow down as they maneuver and need a short time to re-accelerate. This penalty can be used to specify this slowdown period.
This setting can also be used as a way to express your preference to only perform the minimum number of tacks and jibes. In this case, adjust this setting to a large enough value so that the paths generated have, what you consider, is a good number of tacks and jibes.
There are two worthy notes for this setting:
this penalty represents the length of time when the vessel has a zero speed. Setting this too high may result in what you think is the right number of tacks and jibes, but the route may also be slowed down more than is reasonable.
the penalty time you specify may be larger than the time interval between adjacent isochrones. For example, the tack / jibe penalty for a large, square rigged ship, may be quite large. By default the solver starts stepping through time with a fine time interval and the penalty may be larger than this time step. The solver imposes a maximum amount of penalty that can be applied, based on its isochrone time interval. You can think of the maximum penalty as being around ½ of the isochrone time interval. In this example, the solver may generate more tacks / jibes for the square rigged ship than expected.
Night tack / jibe penalty.
If you prefer to maneuver less at night than in daylight, this can be expressed through this setting.
Note that this does not fully model reality. In reality, vessels may bring a maneuver forward into daylight before nightfall. The solver is not able to do that. The navigator should look for these situations and act accordingly.
Example tack / jibe penalty.
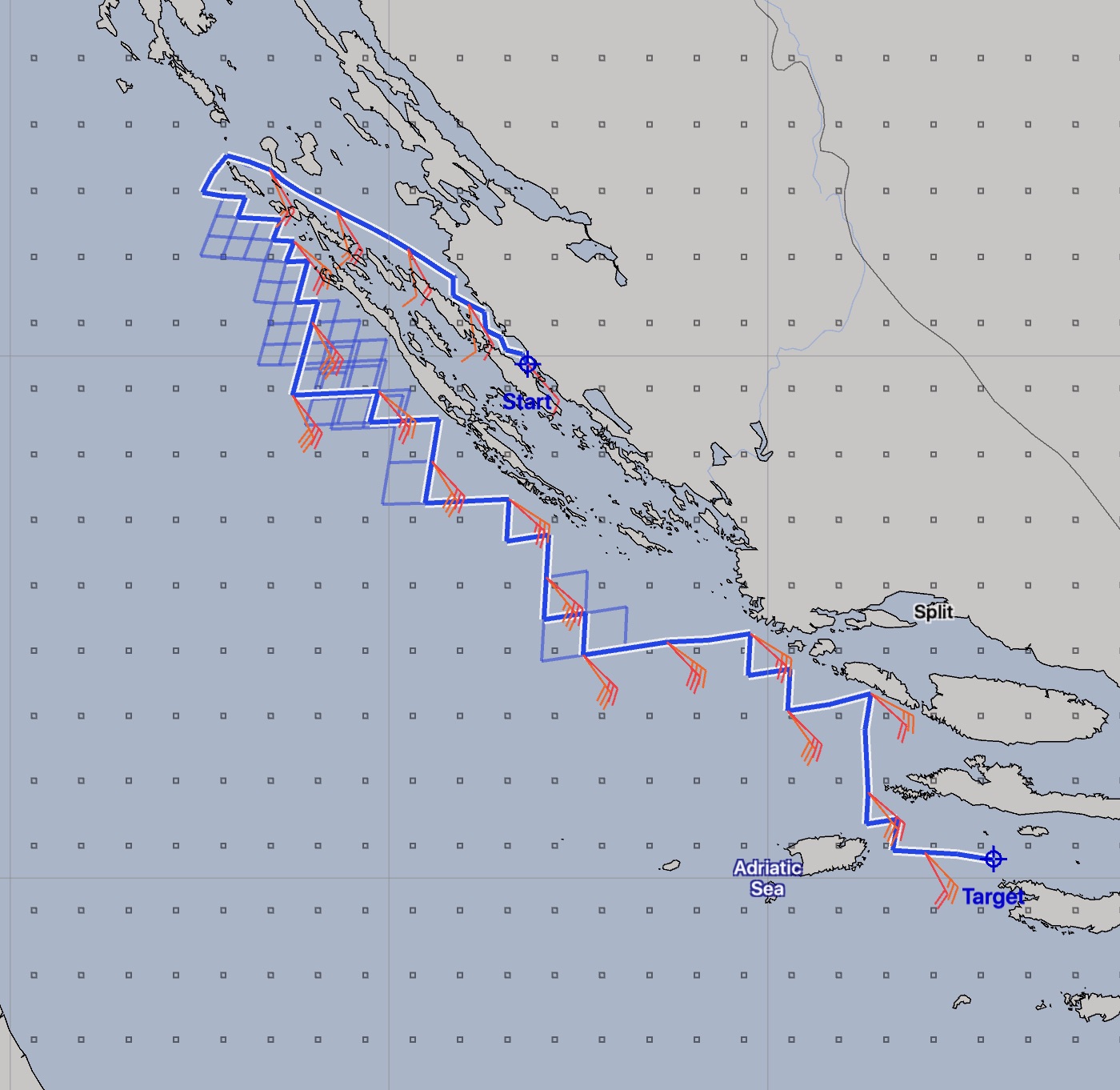
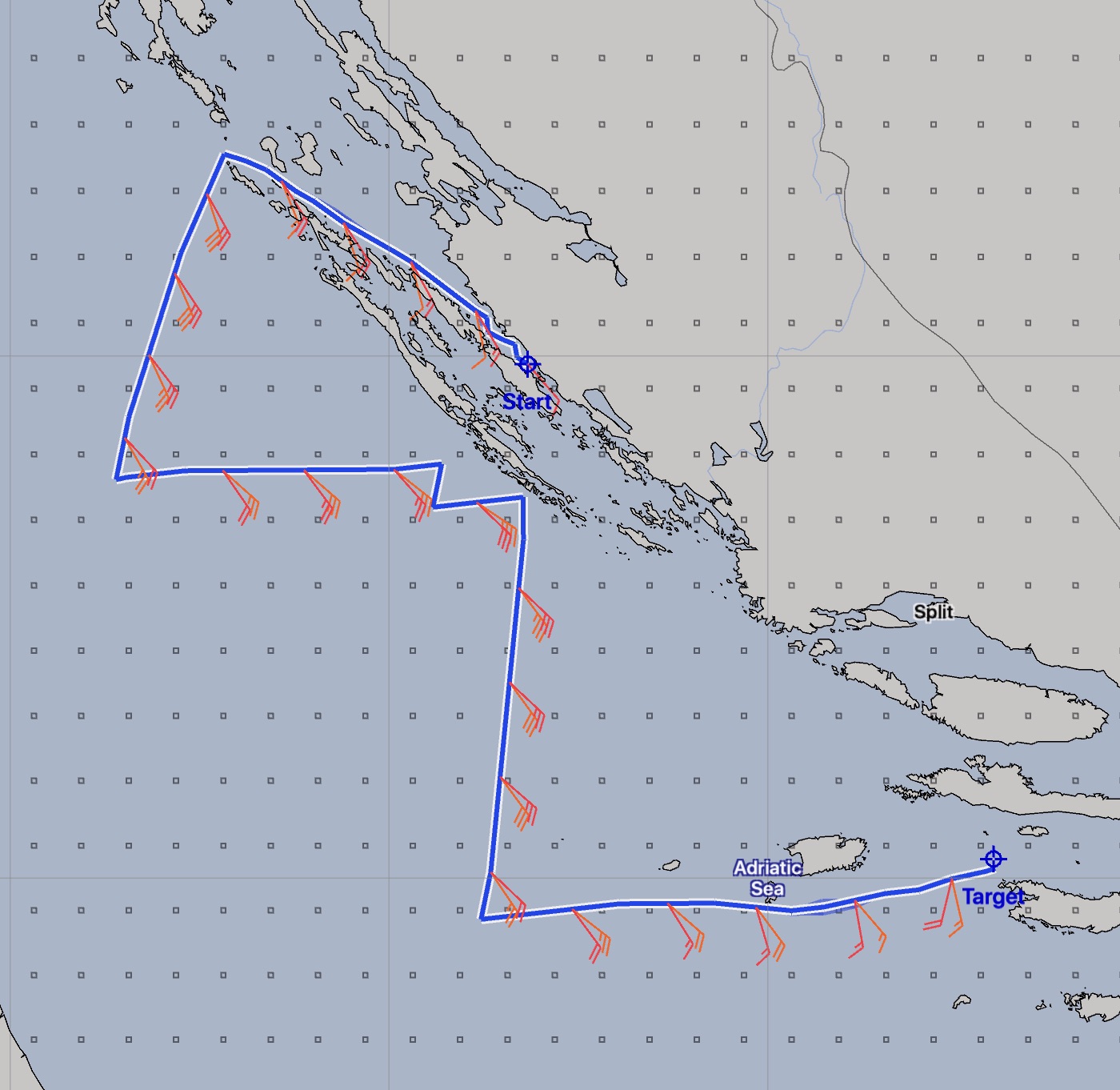
The winds are almost directly against the vessel. The upwind sailing angle limit has been set to 40° apparent.
In the image on the left, there is no tack / jibe penalty applied.
In the image on the right, the tack / jibe penalty was set to 4 min during daytime and 10 min at night.
The duration of the path on the left is 1 day 9.4 hours, on the right its 1 day 11 hours.
The values used in this example are not special, they just worked well for this particular situation. If you are considering applying the tack / jibe penalty to your vessel, you should experiment with different values. The solver is very fast. You can iterate quickly through many different values, until you find a combination that works well for you.